Overview: ~2kW motor enclosure. Some interesting challenges such as water proofing, heat dissipation, and trying to build this with hand-tools. I’ll post a video and some other notes soon. I tested this on the water and could propel me on a paddleboard slightly faster than I could paddle at maximum. Overall, it worked pretty well- putting out a handsome 10-20kG static thrust. Despite some small leaks! The power output had fluctuated largely because I didn’t optimize the propeller-motor size, and the Motor Controller was not programmed for this kind of loading.
Motivation: We like to go paddling but in the SF bay area most places are either the Ocean or the Bay. The typical breeze and currents and larger expanses to cover make it tantalizing to have a boost. Ideally being able to rip would be awesome. I was also interested in experimenting with Ingress Protection strategies for motors.
Challenge: Making a watertight enclosure with electrical cables and a spinning shaft is not so trivial. The motor will definitely warm up and must have a way for heat to exit, so a 3D printed plastic enclosure will ultimately fail and metal would be preferred. Since this will be in a saltwater caustic environment, aluminum is preferred over steel, especially since it is relatively easier to cut and shape with the tools I have at home!
Process and Results: this was designed around a ~2kW motor I had lying around and during the pandemic lockdown, I had to utilize very scrappy processes at home, such as hand drilling bolt patterns, and brazing aluminum. To seal around a spinning shaft, I discovered ‘Rotary seals’ which are a little O-ring flange with a spring for tightness. To seal around the existing cables and plug other holes around the cap I used hot-glue… This was not a good solution as the hot glue can contract and delaminate when immersed - epoxy would be a better DIY solution for sealing this.
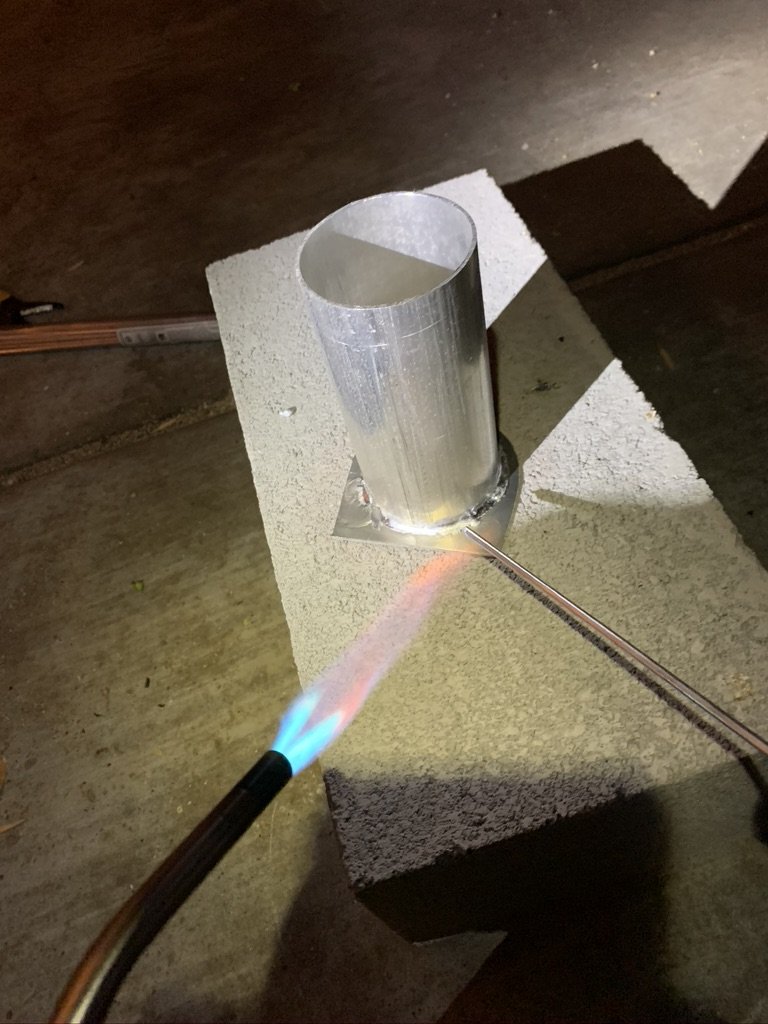
brazing aluminum was a little tricky as it needed a more stable temperature between wetting of the rod and not to hot to burn through the substrate

Aluminum Enclosure and Initial Plastic Enclosure